")
")

Packing and palletizing line loose potatoes
The system takes loose potatoes from a feed system, weighs them, and distributes them evenly in a pack. The packs are then stacked on a pallet by a robot.
The empty packs are taken over by a customer conveyor belt, turned and fitted with a cardboard insert. The loose potatoes are portioned by a weighing system and fed to the line via a conveyor belt system. A swivel hopper distributes the potatoes evenly into the packs. These are then stacked on a pallet by a robot and prepared for removal by a forklift truck.
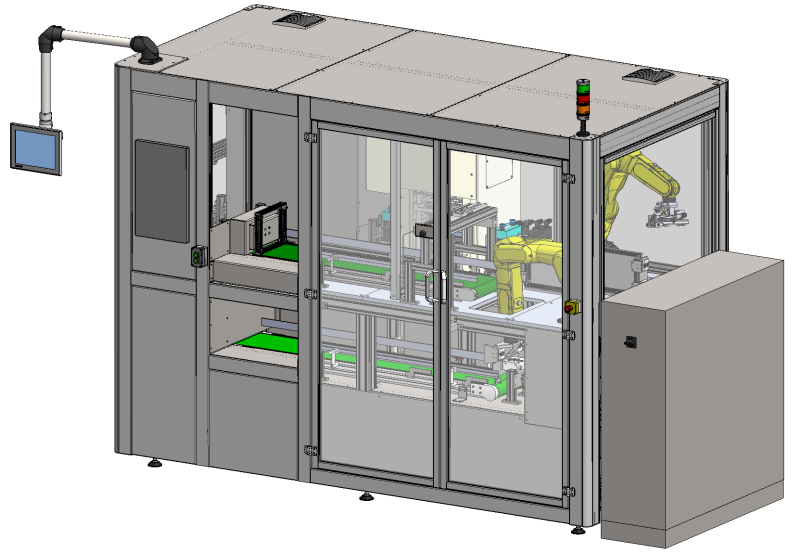
Folding and gluing line beverage bags
The system folds the corners of various beverage bags and glues them in place.
The bags are manually inserted into the folding station by the operator. A turntable swivels the bags into the working area of the robot. The robot sprays glue onto the designated areas. The corners are then pneumatically folded and pressed onto the gluing area. The turntable has two folding stations, so the robot and the operator can work in parallel.
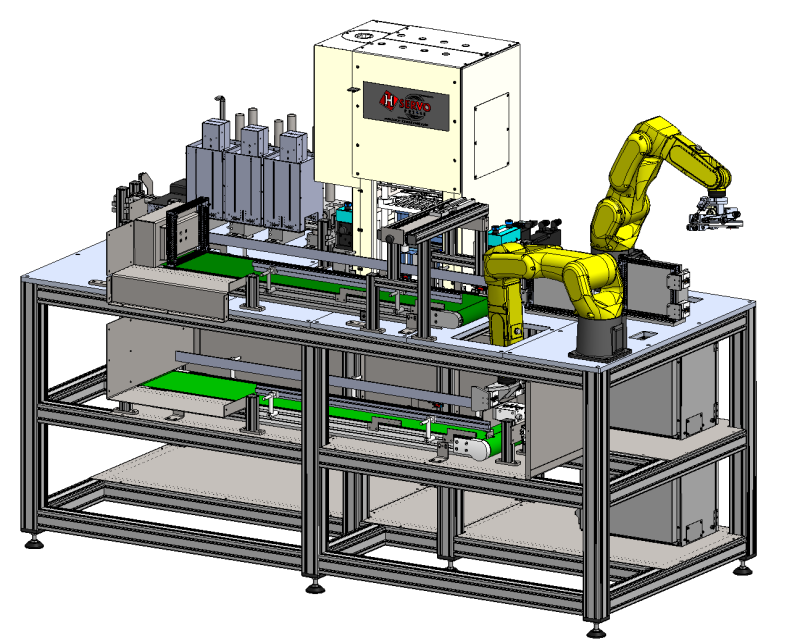
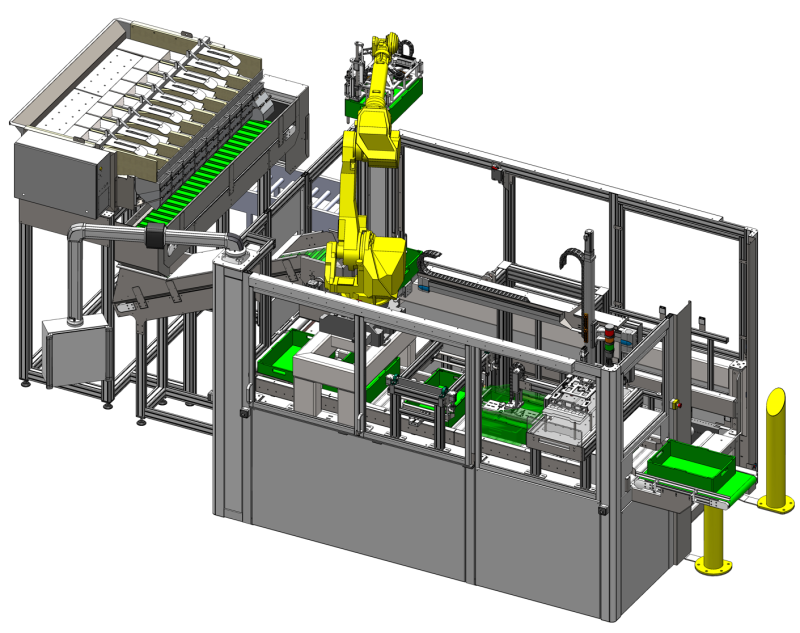
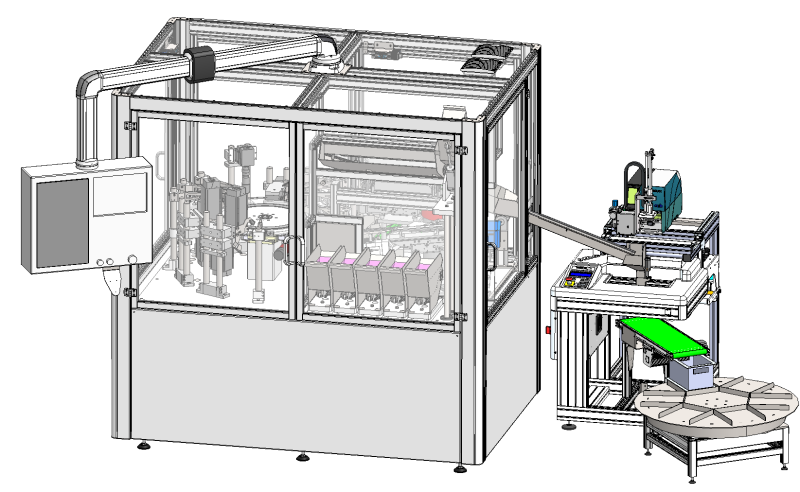
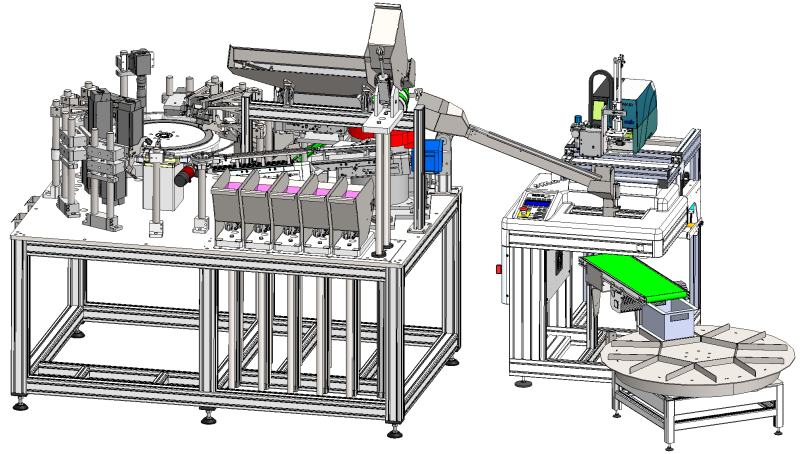
Testing and magazine punching strip
The system checks the quality of a punching strip, cuts it to length and fills strip magazines with it.
A continuous die-cutting strip is taken over synchronized by the high-performance die-cutting system and checked for various quality features by means of four high resolution cameras. The defective elements are removed from the strip, after which the continuous strip is cut to length. A robot picks up the strip and loads it into a strip magazine. The full magazines are placed on a conveyor belt by a second robot, at the end of which they are removed by the operator.
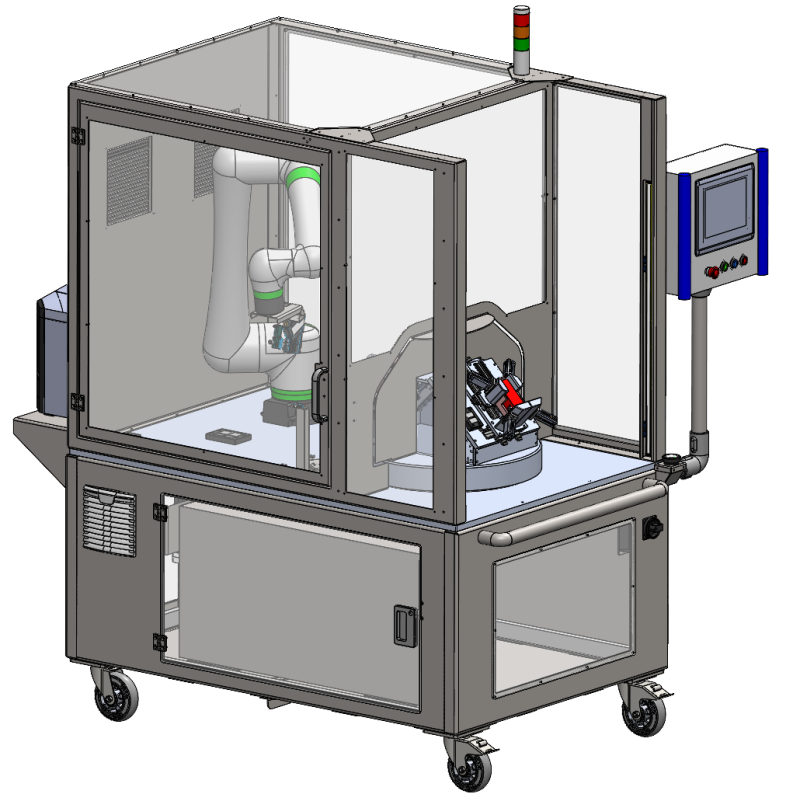
Testing system for small parts
The system separates small parts at high speed to over 600 parts per minute, checks them for quality and then packs them in plastic bags and boxes.
Various small parts are fed to a separator via a spiral bowl and linear conveyor. This places the parts on a glass turntable on which the quality inspection is carried out from below, from above and from the side. The good parts are counted, packed into bags and put into boxes, the bad parts are sorted out according to selected inspection characteristics.
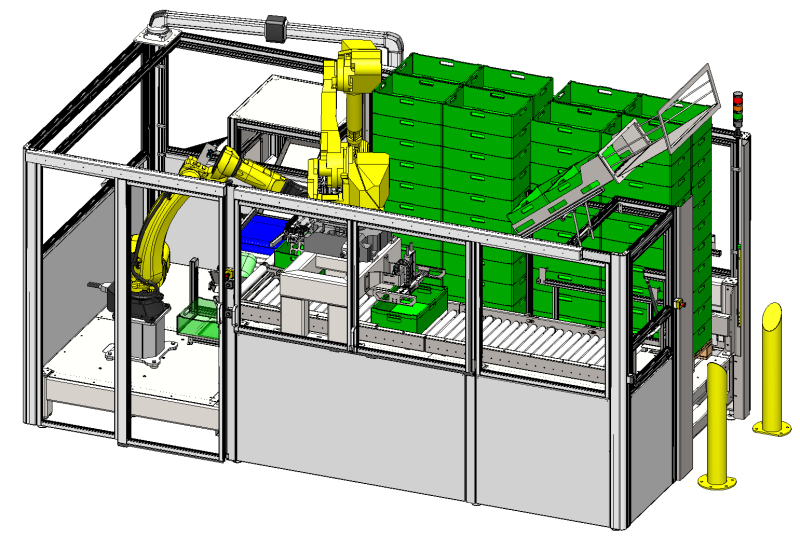
Palletizer potato bags
The system takes potato sacks from a conveyor belt and fills them into containers that are stacked on a pallet.
The potato sacks are checked for their weight at the beginning. A robot now takes over the permissible sacks and fills a container with them. Another robot stacks the containers on a pallet, where they are prepared for removal by a forklift truck.
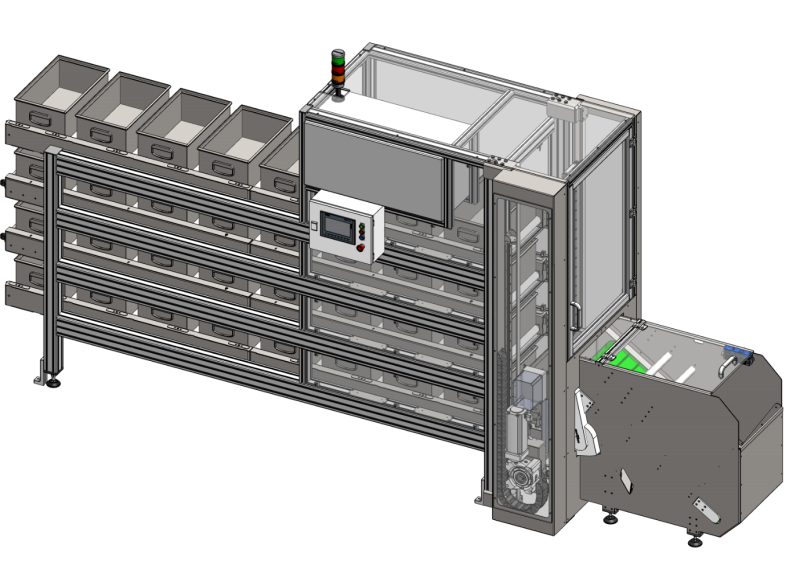
Crate handling
The system collects small parts and uses them to fill steel crates up to a defined gross weight.
Up to 16 full and 16 empty steel crates can be picked up by this crate handling system. The empty crates are transferred to a lift via roller conveyors and moved to the loading position. The parts arriving from the customer's plant are now filled into the crates via a conveyor belt. When the crates reaches the target weight, the lift transports the crate to the unloading rollers.
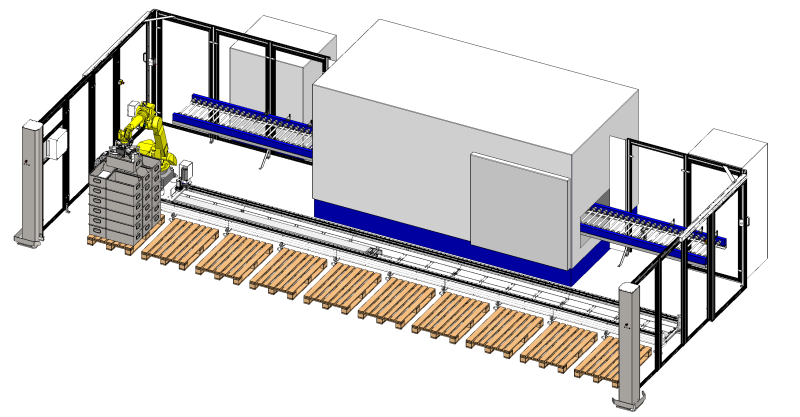
Washing system with 3D vision
A robot on a linear guide loads and unloads a parts washing machine with steel boxes.
The position of steel boxes stacked on pallets is detected by a 3D vision system and the boxes are transported by a robot to the loading position of the washing machine. The washed boxes are removed by the same robot and stacked on another pallet that has become free. To accomplish this task, the robot has an additional 7th axis that allows it to travel along the pallet locations.
As a result, the washing system achieves an autonomy of an entire night shift, thus significantly increasing productivity.