")
")

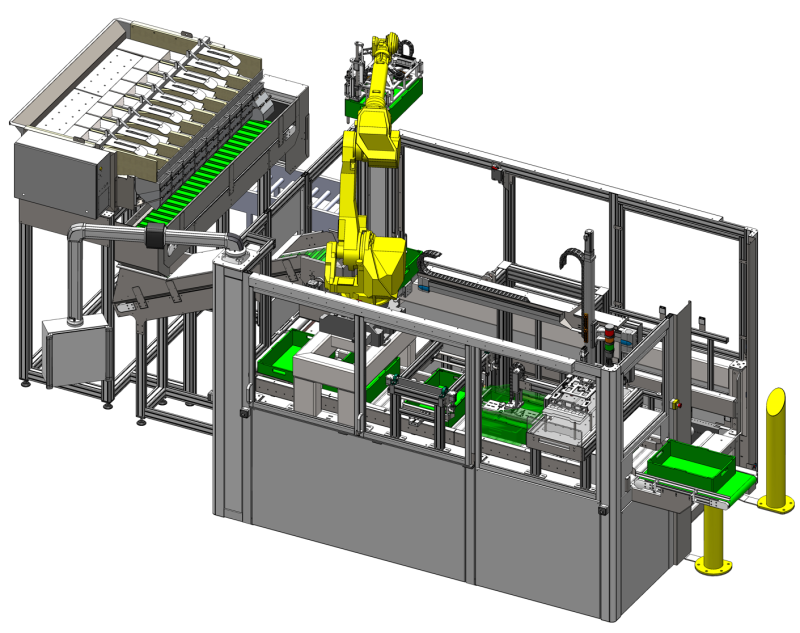
Verpackungs und Palettieranlage lose Kartoffeln
Die Anlage übernimmt lose Kartoffeln von einem Zuführsystem, wägt diese ab und verteilt sie gleichmässig in einem Gebinde. Die Gebinde werden anschliessend von einem Roboter auf einer Palette gestapelt.
Die leeren Gebinde werden von einem kundenseitigen Transportband übernommen, gedreht und mit einer Kartoneinlage versehen. Die losen Kartoffeln werden durch ein Wäägesystem portioniert und über ein Transportbandsystem der Anlage zugeführt. Ein Schwenktrichter verteilt die Kartoffeln gleichmässig in die Gebinde. Diese werden anschliessend durch einen Roboter auf eine Palette gestapelt und zum Abtransport durch einen Stapler bereitgestellt.
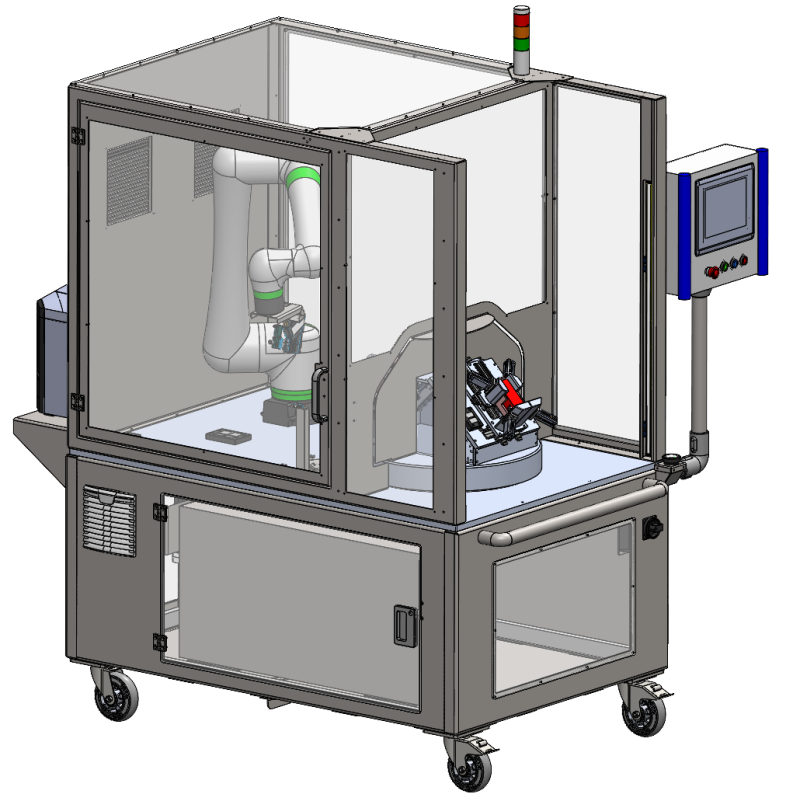
Falt- und Klebanlage Getränkebeutel
Die Anlage faltet die Ecken verschiedener Getränkebeutel und klebt sie fest.
Die Beutel werden manuell durch den Bediener in die Faltstation eingelegt. Ein Drehteller schwenkt die Beutel in den Arbeitsbereich des Roboters. Dieser spritzt Kleber auf die dafür vorgesehenen Stellen. Anschliessend werden die Ecken pneumatisch gefaltet und auf die Klebstelle gedrückt. Der Drehteller verfügt über zwei Faltstation, so kann der Roboter und der Bediener parallel arbeiten.
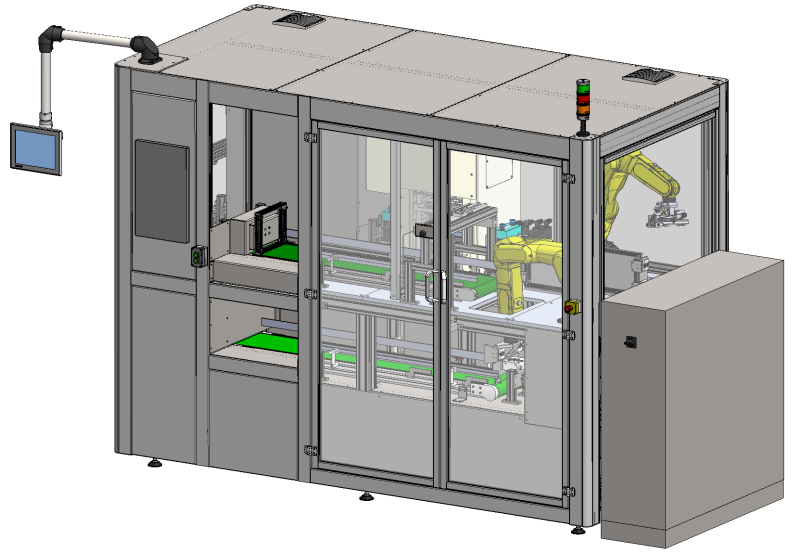
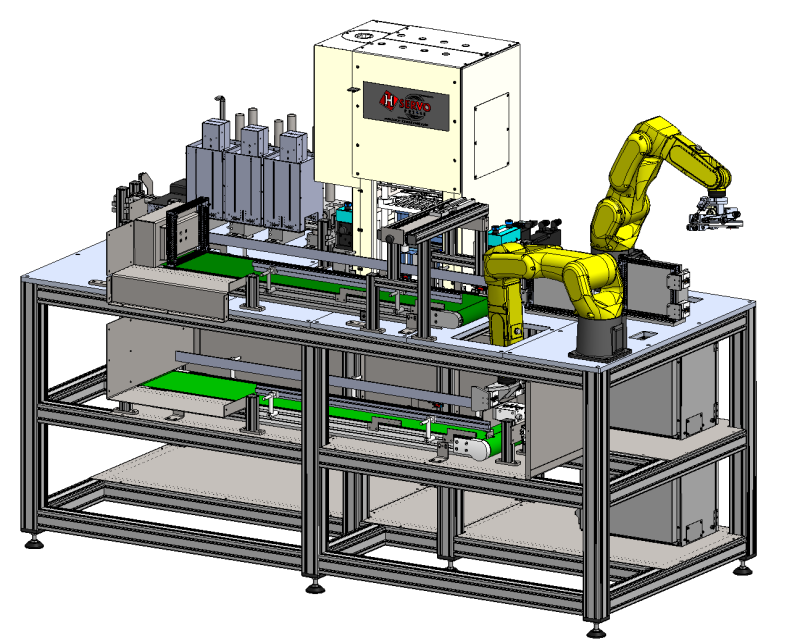
Prüf- und Magazinieranlage Stanzstreifen
Die Anlage prüft die Qualität eines Stanzstreifens, längt diesen ab und befüllt damit Streifenmagazine.
Ein Endlosstanzstreifen wird synchronisiert von der Hochleistungs-Stanzanlage übernommen und mittels vier hochauflösenden Kameras auf verschiedene Qualitätsmerkmale überprüft. Die fehlerhaften Elemente werden aus dem Streifen entfernt, anschliessend wird der Endlosstreifen abgelängt. Ein Roboter greift den Streifen und belädt damit ein Streifenmagazin. Die vollen Magazine werden von einem zweiten Roboter auf ein Förderband abgesetzt, an dessen Ende sie vom Bediener entnommen werden.
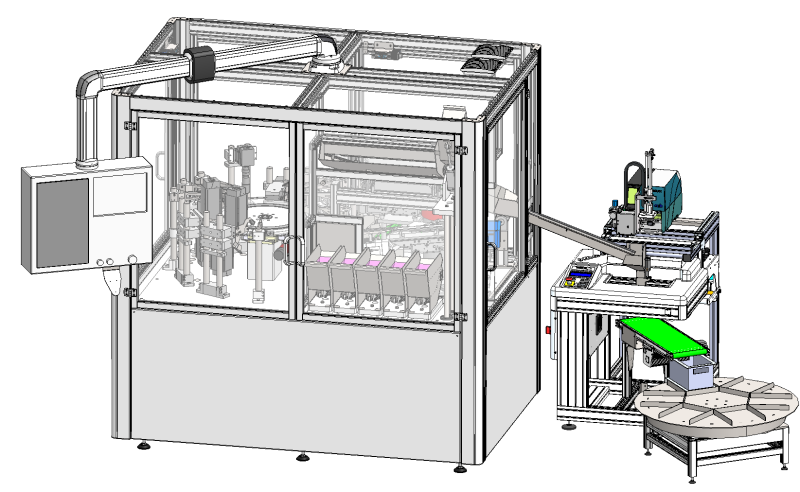
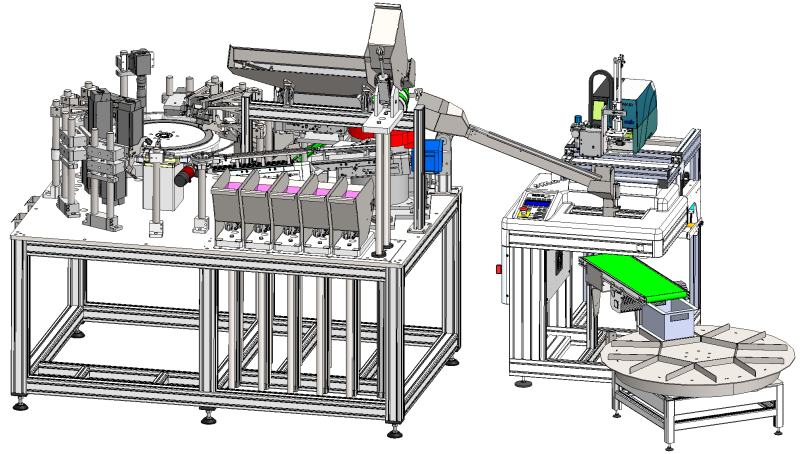
Prüfanlage für Kleinteile
Die Anlage vereinzelt Kleinteile mit hoher Geschwindigkeit auf bis zu über 600 Teile pro Minute, prüft diese auf ihre Qualität und verpackt sie anschliessend in Kunststoffbeutel und Kisten.
Verschiedene Kleinteile werden über einen Wendeltopf sowie Linearförderer einer Vereinzelung zugeführt. Diese legt die Teile auf einen gläsernen Drehtisch, auf welchem die Qualitätsprüfung von unten, von oben sowie von der Seite erfolgt. Die Gutteile werden abgezählt in Säcke abgepackt und in Kisten gefüllt, die Schlechtteile werden nach gewählten Prüfmerkmalen ausgesondert.
Palettieranlage Kartoffelsäcke
Die Anlage übernimmt Kartoffelsäcke von einem Transportband und befüllt damit Gebinde, welche auf einer Palette gestapelt werden.
Die Kartoffelsäcke werden zu Beginn auf ihr Gewicht überprüft. Ein Roboter übernimmt nun die zulässigen Säcke und befüllt damit ein Gebinde. Ein weiterer Roboter stapelt die Gebinde auf eine Palette, wo sie zum Abtransport durch einen Stapler bereitgestellt werden.
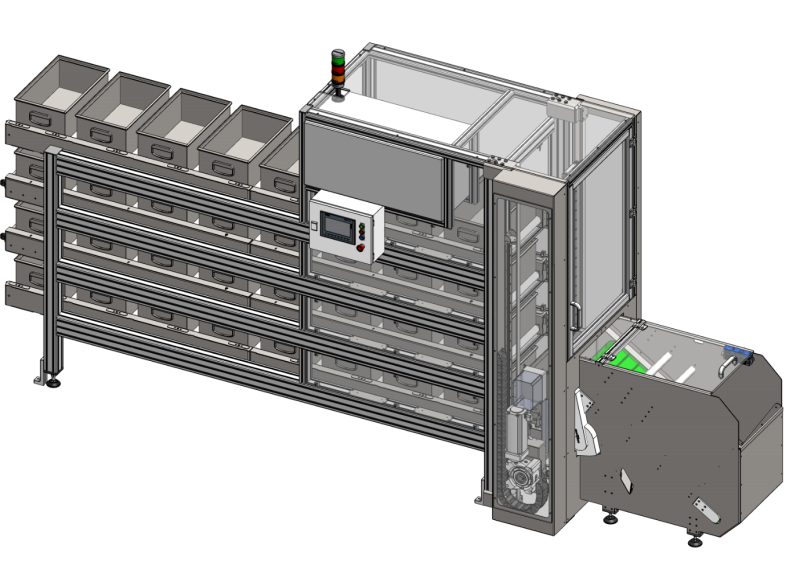
Kistenhandling
Die Anlage übernimmt Kleinteile und befüllt damit Schäferkisten bis zu einem definierten Bruttogewicht.
Bis zu 16 volle und 16 leere Schäferboxen können von diesem Kistenhandling aufgenommen werden. Die leeren Boxen werden über Rollenbahnen an einen Lift übergeben und an die Beladeposition gefahren. Die von der kundenseitigen Anlage ankommenden Kleinteile werden nun über ein Förderband in die Boxen gefüllt. Erreicht die Box das Sollgewicht, befördert der Lift die Box zu den Entnahmerollen.
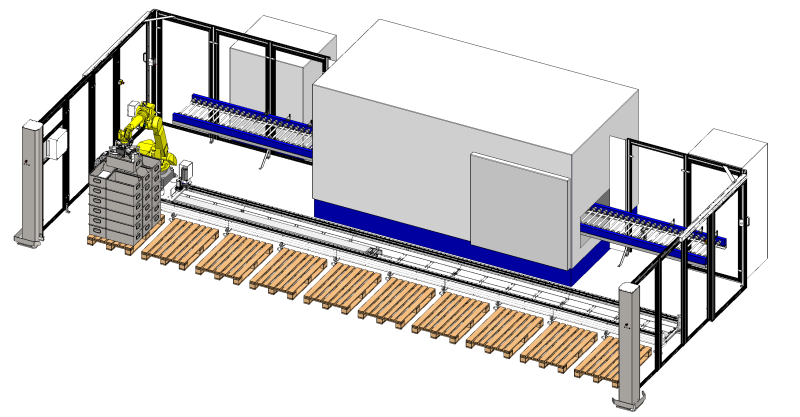
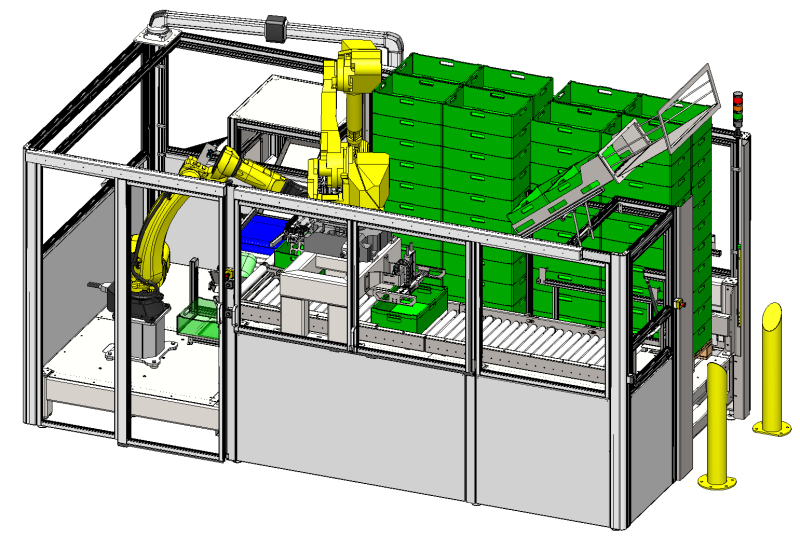
Be- und Entladen einer Waschanlage mit 3D-Vision
Ein Roboter auf einer Linearführung be- und entlädt eine Teile-Waschanlage mit Schäferboxen.
Die Position von, auf Paletten gestapelten Schäferboxen wird durch ein 3D-Vision-System erkannt und die Boxen von einem Roboter auf die Beladeposition einer Waschanlage befördert. Die gewaschenen Boxen werden vom selben Roboter entnommen und auf einer anderen, frei gewordenen Palette gestapelt. Um diese Aufgabe zu erfüllen, besitzt der Roboter eine zusätzliche 7. Achse, welche ihm das Verfahren entlang der Palettenplätze erlaubt.
Dadurch erreicht die Waschanlage eine Autonomie von einer ganzen Nachtschicht und steigert dadurch die Produktivität signifikant.